




Planeettapyörästöä käytetään laajalti voimansiirtomekanismina erilaisissa tekniikan alan käytännöissä, kuten alennusvaihteissa, nostureissa, planeettapyörästöalennusvaihteissa jne. Planeettapyörästö voi monissa tapauksissa korvata kiinteän akselin hammaspyörästön voimansiirtomekanismin. Koska hammaspyörästön siirto tapahtuu linjakosketuksessa, pitkäaikainen kytkeytyminen aiheuttaa hammaspyörän rikkoutumisen, joten sen lujuus on simuloitava. Li Hongli ym. käyttivät automaattista kytkeytymismenetelmää planeettapyörästön kytkemiseen ja havaitsivat, että vääntömomentti ja suurin jännitys ovat lineaarisia. Wang Yanjun ym. myös kytkeivät planeettapyörästön automaattisella generointimenetelmällä ja simuloivat planeettapyörästön staattista ja modaalista simulointia. Tässä artikkelissa käytetään pääasiassa tetraedri- ja heksaedrielementtejä verkon jakamiseen, ja lopputuloksia analysoidaan sen selvittämiseksi, täyttyvätkö lujuusehdot.
1. Mallin luominen ja tulosten analysointi
Planeettavaihteiston kolmiulotteinen mallinnus
Planeettapyörästökoostuu pääasiassa kehäpyörästä, aurinkopyörästä ja planeettapyörästä. Tässä artikkelissa valitut pääparametrit ovat: sisemmän hammaskehän hampaiden lukumäärä on 66, aurinkopyörän hampaiden lukumäärä on 36, planeettapyörän hampaiden lukumäärä on 15, sisemmän hammaskehän ulkohalkaisija on 150 mm, moduuli on 2 mm, puristuskulma on 20°, hampaan leveys on 20 mm, lisäyskorkeuskerroin on 1, välyskerroin on 0,25 ja planeettapyöriä on kolme.
Planeettavaihteiston staattinen simulaatioanalyysi
Määritä materiaalin ominaisuudet: tuo UG-ohjelmistolla piirretty kolmiulotteinen planeettapyörästö ANSYS-järjestelmään ja aseta materiaaliparametrit alla olevan taulukon 1 mukaisesti:

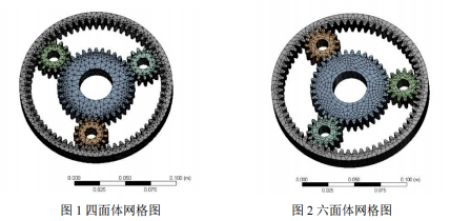
Verkko: Äärellisen elementin verkko on jaettu tetraedriin ja heksaedriin, ja elementin peruskoko on 5 mm. Koskaplaneettavaihteisto, aurinkopyörä ja sisempi hammaspyörärengas ovat kosketuksessa ja verkkomaiset, kosketus- ja verkko-osien verkko on tiivistetty ja koko on 2 mm. Ensin käytetään tetraedrisiä verkkoja, kuten kuvassa 1 on esitetty. Yhteensä luodaan 105 906 elementtiä ja 177 893 solmua. Sitten käytetään heksaedristä verkkoa, kuten kuvassa 2 on esitetty, ja luodaan yhteensä 26 957 solua ja 140 560 solmua.
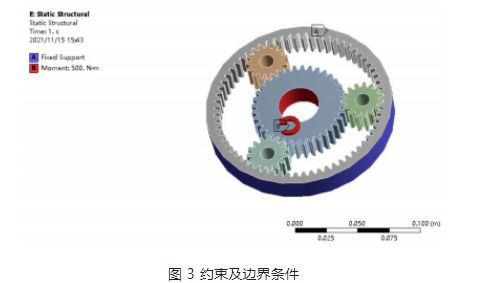
Kuorman käyttö ja reunaehdot: Planeettapyörästön toimintaominaisuuksien mukaan alennusvaihteessa aurinkopyörä on vetävä vaihde, planeettapyörä on varustettava vaihde ja lopullinen teho tulee planeettapyörästön kantolaitteen kautta. Kiinnitä sisempi hammaspyörärengas ANSYS:iin ja kohdista aurinkopyörään 500 N · m vääntömomentti, kuten kuvassa 3 on esitetty.
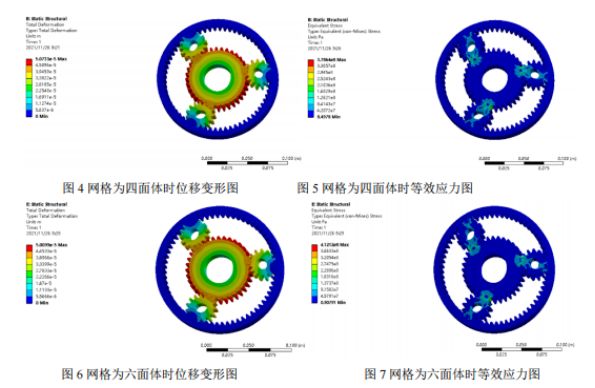
Jälkikäsittely ja tulosanalyysi: Alla on esitetty kahdesta ruudukkojaosta saadut staattisen analyysin siirtymänefogrammi ja vastaava jännitysnefogrammi, ja suoritetaan vertaileva analyysi. Kahden tyyppisen ruudukon siirtymänefogrammista havaitaan, että suurin siirtymä esiintyy kohdassa, jossa aurinkopyörä ei ole lommossa planeettapyörän kanssa, ja suurin jännitys esiintyy hammaspyörän verkon tyvessä. Tetraedrisen ruudukon suurin jännitys on 378 MPa ja kuusiokulmaisen ruudukon suurin jännitys on 412 MPa. Koska materiaalin myötöraja on 785 MPa ja varmuuskerroin on 1,5, sallittu jännitys on 523 MPa. Molempien tulosten suurin jännitys on pienempi kuin sallittu jännitys, ja molemmat täyttävät lujuusehdot.
2. Johtopäätös
Planeettavaihteiston elementtimenetelmäsimulaatiolla saadaan vaihdejärjestelmän siirtymän muodonmuutosnefogrammi ja vastaava jännitysnefogrammi, joista saadaan maksimi- ja minimitiedot sekä niiden jakaumaplaneettavaihteistomalli löytyy. Suurimman ekvivalenttijännityksen sijainti on myös se kohta, jossa hammaspyörän hampaat todennäköisimmin pettävät, joten siihen on kiinnitettävä erityistä huomiota suunnittelun tai valmistuksen aikana. Analysoimalla koko planeettapyörästöä voidaan korjata vain yhden hammaspyörän hampaan analysoinnista johtuva virhe.
Julkaisun aika: 28.12.2022